3D-карта объекта
Цифровая модель территории с зонами контроля, ограничениями полёта и точками интереса. Основа для всех облётов.
Платформа ДронДек для автономного мониторинга промышленных объектов. Превращает задачу мониторинга в автономную миссию — от 3D-карты до структурированного отчёта.
Цифровая модель территории с зонами контроля, ограничениями полёта и точками интереса. Основа для всех облётов.
Визуально-инерциальная навигация на основе камеры и датчиков. Полёт по маршруту без GPS, лидаров и радаров.
Архив актов осмотра с возможностью сравнения состояния объекта по датам и отслеживания динамики дефектов.
Оператор описывает облёт в свободной форме. Платформа сама формирует маршрут и параметры полёта.
Поиск объектов по фото или описанию, выявление дефектов, настройка детекторов под специфику объекта заказчика.
Автоматическая передача актов и заявок на устранение в систему учёта и систему ТОиР заказчика.
Конкретный набор активных функций в проекте определяется на диагностике объекта. Ниже базовый каталог возможностей, сгруппированный по задачам.
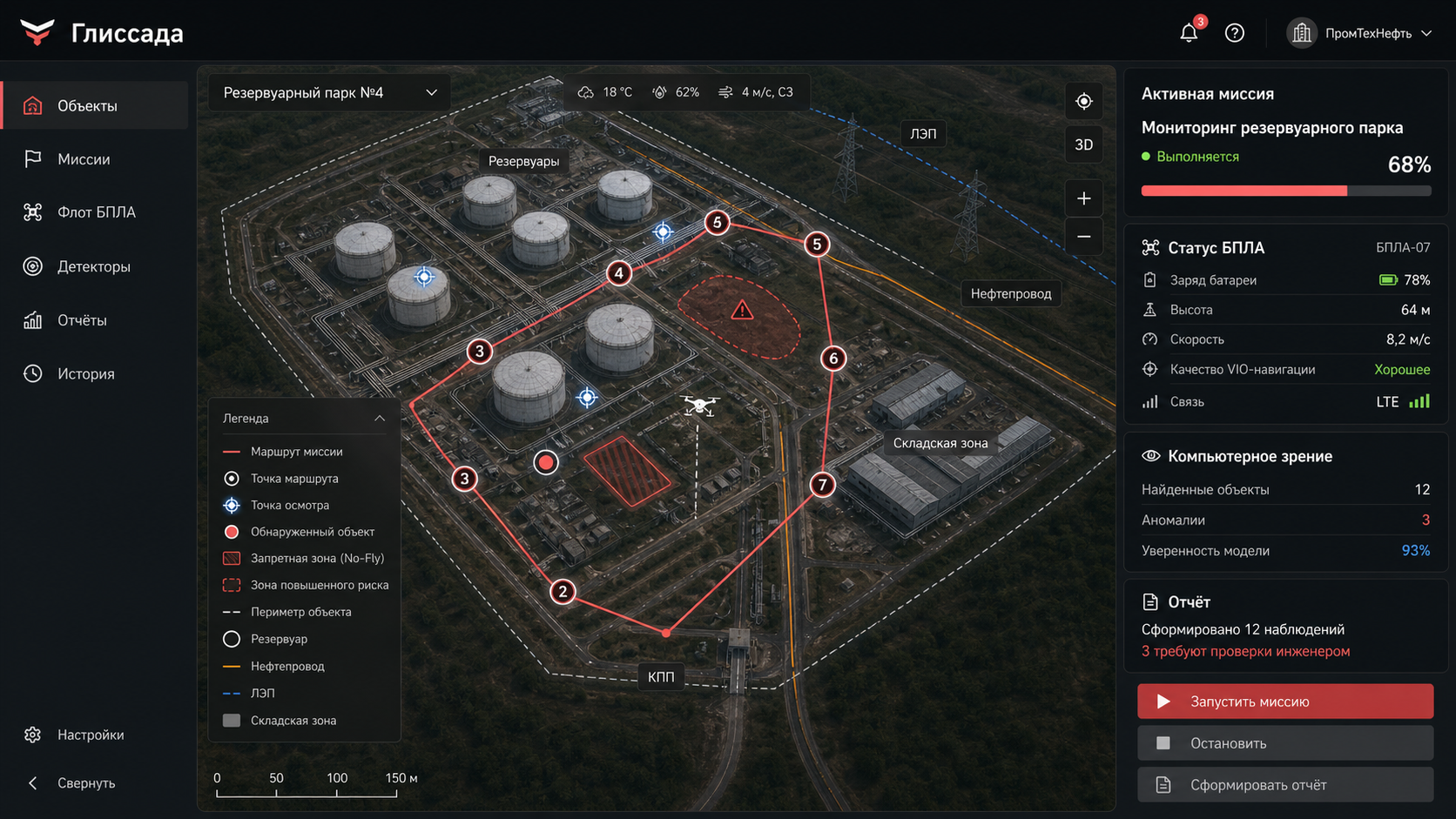
Запуск, остановка, прогресс выполнения, ручной возврат на базу.
Батарея, высота, скорость, качество VIO-навигации, статус связи.
Найденные объекты, аномалии и уверенность модели в реальном времени.
Маршрут миссии, точки осмотра, запретные зоны, легенда условных обозначений.
Список наблюдений с выделением требующих проверки инженером, формирование PDF.
Стек подобран под три ключевых требования: работа в реальном времени на борту дрона, обработка видеопотока с GPU, и интеграция с промышленным ИТ-ландшафтом без вендор-лока.
Автономный полёт без интернета и без GPS, реальное время, низкая латентность.
ROS 2 — индустриальный стандарт для распределённых робототехнических узлов; MAVLink даёт совместимость с любым полётным контроллером. Собственная реализация визуально-инерциальной навигации не зависит от лидаров, радаров и спутника — работает в металлоконструкциях и зонах помех. Инференс моделей на Jetson — без задержек на сервер.
Инференс на борту дрона и batch-аналитика на сервере.
PyTorch для разработки моделей, ONNX для лёгкого инференса на Jetson на борту, CUDA на серверах для аналитики по всей истории инспекций. Поддерживаем загрузку собственных детекторов клиента.
API, хранение миссий и отчётов, обработка видеопотоков от парка дронов.
Python + FastAPI — быстрая разработка и асинхронность. Postgres + Redis — стандартный надёжный стек. Kubernetes — для горизонтального масштабирования и on-premise развёртывания у заказчиков с замкнутым контуром.
Панель управления, 3D-карты, real-time телеметрия, архив инспекций.
WebGL и Three.js рендерят 3D-карты объектов в браузере без плагинов. ClickHouse для быстрых аналитических запросов по истории инспекций. Kafka буферизует потоки данных с парка дронов.
Все компоненты — собственная разработка команды.






Эти сценарии настраиваются под объект на диагностике. Один объект может использовать несколько одновременно — например, плановые облёты + проверки после событий.
2–4 миссии в день по расписанию: одинаковые маршруты, одинаковые ракурсы, накопление истории объекта. Подходит для периметра, резервуарных парков, ЛЭП.
Запуск облёта по триггеру — буря, гроза, авария на соседнем участке, сейсмическое событие. Быстрая оценка состояния без выезда бригады.
Две инспекции одного объекта на разных датах рядом друг с другом. Подсветка изменений: новые пятна на резервуаре, смещение опоры, появление техники в опасной зоне.
Задача формулируется словами: «найди следы протечки на швах резервуаров» или «найди скопления влаги под трубопроводом». Без предобучения модели.
Есть фотография повреждения — найти такие же на всём массиве снимков с парка БПЛА. One-shot CV без дообучения.
Финальная цена зависит от площади объекта, количества маршрутов, типа дронов в парке и требуемых детекторов. Ниже — ориентировочные диапазоны лицензионной стоимости платформы «Глиссада» в привязке к парку дронов. Внедрение под ключ и сопровождение оцениваются отдельно.
Платная диагностика · внедрение по итогам диагностики · годовая подписка на лицензию платформы.
Подробнее об услуге →Бесплатная диагностика задачи · внедрение под ключ · сопровождение и дообучение моделей.
Подробнее об услуге →Минимальная стоимость лицензии — от 60 000 ₽ в год за один дрон. Точная стоимость фиксируется в коммерческом предложении после диагностики объекта. Полные сведения о стоимости — на странице «Информация об ИТ-деятельности».
Расскажите о задаче и объекте — обсудим, как Глиссада может закрыть ваш сценарий мониторинга.
Отправляя обращение, вы соглашаетесь с политикой обработки персональных данных.